
Nei precedenti articoli abbiamo visto alcuni dettagli di come è costruita l’architettura di Kubernetes.
Oggi verranno descritti i meccanismi di funzionamento del motore kubernetes indicando il nome di ogni componente; per rimanere fedeli al paragone del motore dell’autovettura, parleremo degli alberi a camme, valvole, bronzine, … che afferiscono al Cloud Native
Nota1: Non verrà trattata l’installazione di k8s in Datacenter, Cloud e Laboratorio, la rete ha già messo a disposizione esaustivi tutorial.
Per i familiarizzare con k8s vi consiglio di utilizzare Minikube (Piattaforma Linux) Docker Desktop (piattaforma Windows & Mac).
Iniziamo!
Kubernetes Master: E’ il nodo principale del cluster sul quale girano tre processi vitali per l’esistenza del cluster.
- kube-apiserver
- kube-controller-manager
- kube-scheduler
Nel master node è inoltre presente il DataBase etcd, che memorizza tutte le configurazioni create nel cluster.
I nodi che si fanno carico di far girare le applicazioni e quindi i servizi sono detti worker node. I processi presenti sui worker node sono:
- Kubelet
- kube-proxy
kubelet :Un agente che è eseguito su ogni nodo del cluster. Si assicura che i container siano eseguiti in un pod.
Kube-Proxy: Ha la responsabilità di gestire il networking, dalle regole di Routing a quelle di di Load Balancing.
Nota 2: K8s cercherà di utilizzare tutte le librerie disponibili a livello di sistema operativo.
kubectl: E’ Il client ufficiale di Kubernetes (CLI) attraverso il quale è possibile gestire il cluster (Kube-apiserver) utilizzando le API.
Alcuni semplici esempi di comandi kubectl sono:
- kubectl version (indica la versione di k8s installata)
- kubectl get nodes (scopre il numero di nodi del cluster)
- kubectl describe nodes nodes-1 (mostra lo stato di salute del nodo, la piattafoma sulla quale k8s sta girando (Google, AWS, ….) e le risorse assegnate (CPU,RAM)).
Container Runtime: E’ la base sulla quale poggia la tecnologia k8s.
kubernetes supporta diverse runtime tra le quali ricordiamo, container-d, cri-o, rktlet.
Nota 3: La runtime Docker è stata deprecata a favore di quelle che utilizzano le interfacce CRI; le immagini Docker continueranno comunque a funzionare nel cluster.
Gli oggetti base di Kubernetes sono:
- Pod
- Servizi
- Volumi
- Namespace
I controller forniscono funzionalità aggiuntive e sono:
- ReplicaSet
- Deployment
- StatefulSet
- DaemonSet
- Job
Tra i Deployment è indispensabile menzionare Kube-DNS che fornisce i servizi di risoluzione dei nomi. Dalla versione kubernetes 1.2 la denominazione è cambiata in Core-dns.
Add-On: servono a configurare ulteriori funzionalità del cluster e sono collocati all’interno del name space kube-system (come Kube-Proxy, Kube-DNS, kube-Dashboard)
Gli Add-on sono categorizzati in base al loro utilizzo:
- Add-on di Netwok policy. (Ad esempio l’add-on NSX-T si preoccupa della comunicazione tra l’ambiente K8s e VMware)
- Add-on Infrastrutturali (Ad esempio KubeVirt che consente la connessione con le architetture virtuali)
- Add-on di Visualizzazione e Controllo (Ad esempio Dashboard un’interfaccia web per K8s).
Per la messa in esercizio, gli Add-on utilizzano i controller DaemonSet e Deployment.
L’immagine di figura 1 riepiloga quanto appena esposto.
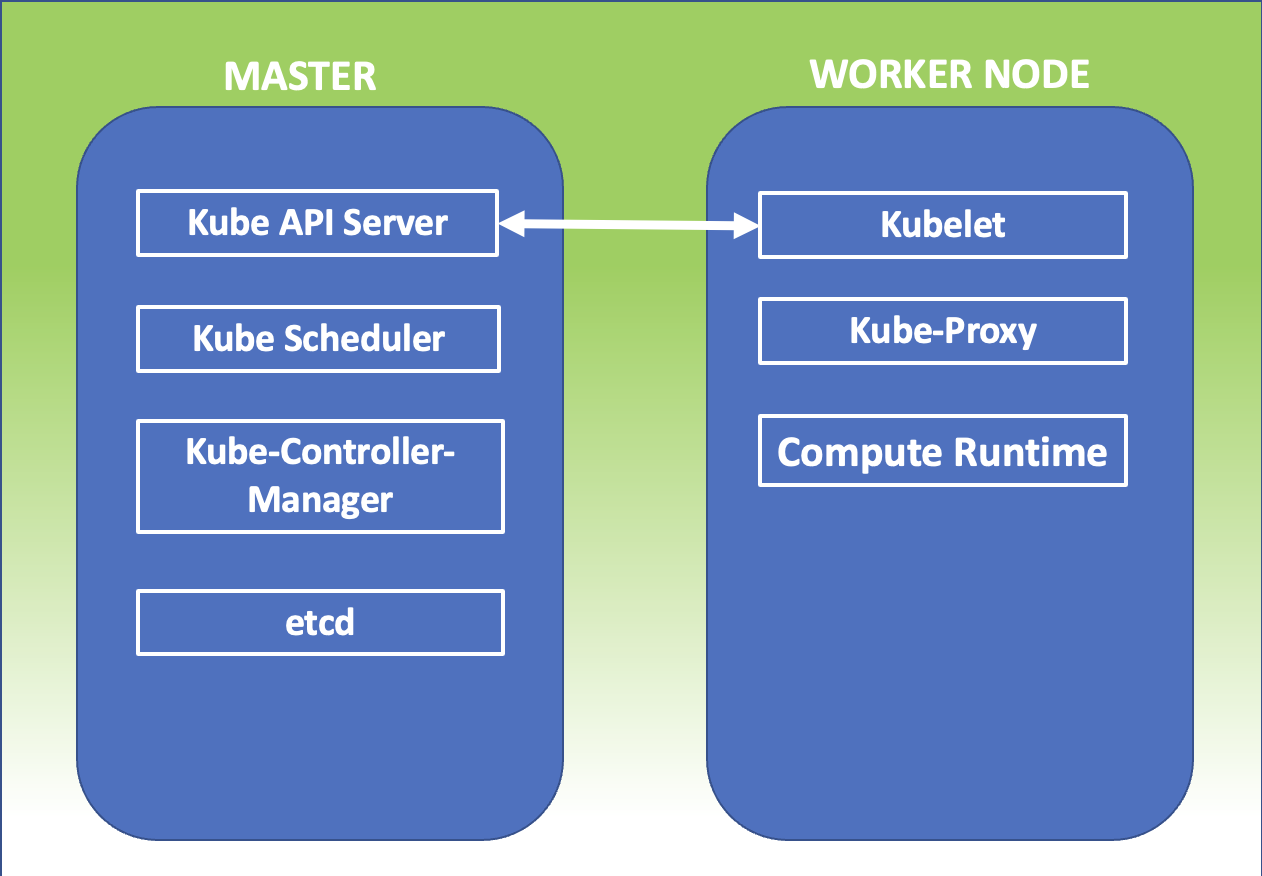 Figura 1
Figura 1

 Figura 1
Figura 1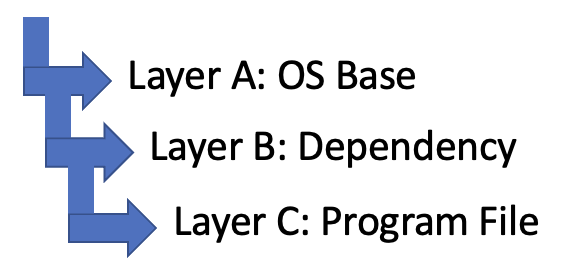 Figura 2
Figura 2 Figura 3
Figura 3
 Immagine 1
Immagine 1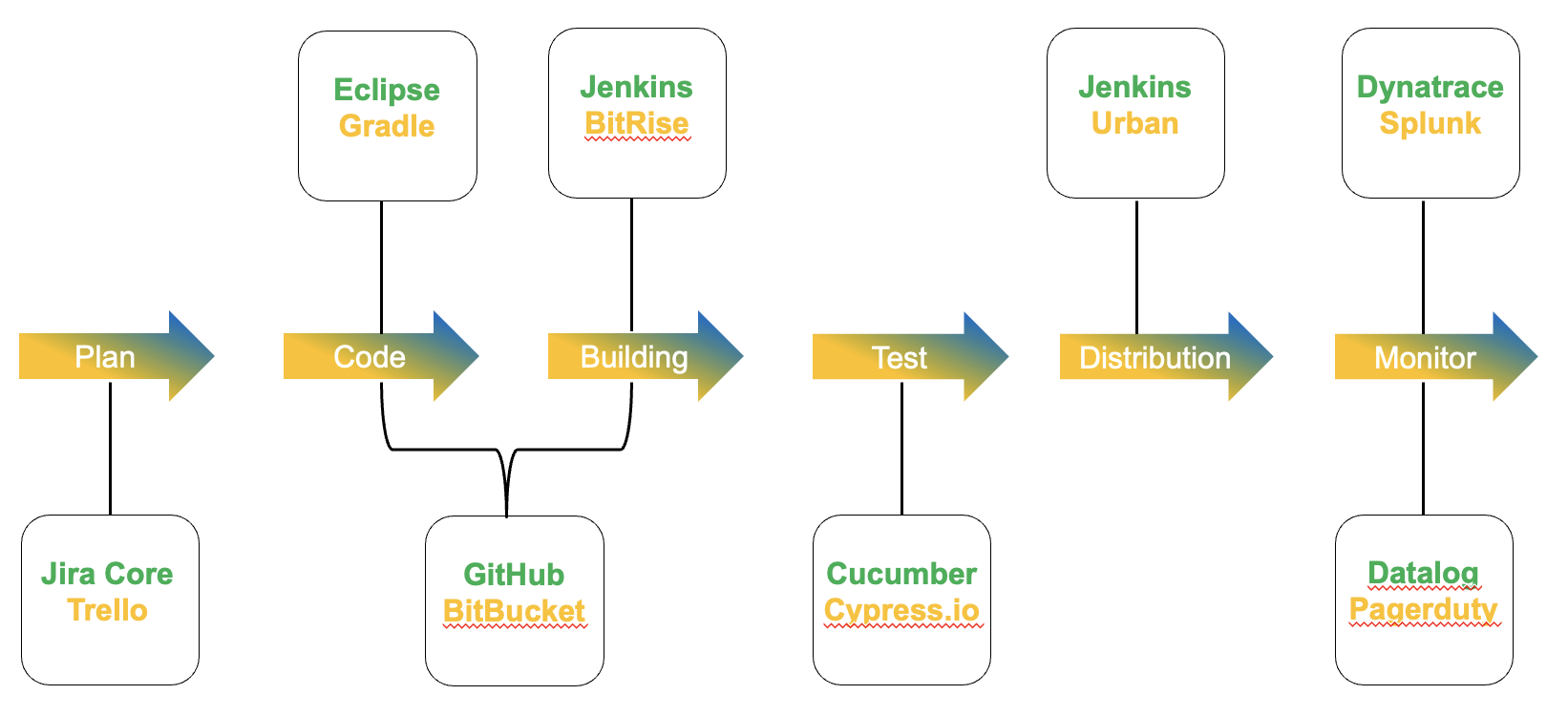 Immagine 2
Immagine 2 Netapp – SnapMirror
Netapp – SnapMirror Picture 1
Picture 1 Picture 2
Picture 2 Picture 3
Picture 3 Picture 4
Picture 4 Picture 5
Picture 5 Picture 6
Picture 6 Picture 7
Picture 7
 Picture 10
Picture 10 Picture 11
Picture 11 Picture 12
Picture 12 Picture 13
Picture 13 Picture 14
Picture 14 Picture 15
Picture 15 Picture 16
Picture 16 Picture 17
Picture 17 Picture 18
Picture 18 Picture 19
Picture 19 Picture 20
Picture 20 Picture 21
Picture 21 Picture 22
Picture 22 Picture 23
Picture 23 Picture 24
Picture 24 Picture 25
Picture 25 Picture 26
Picture 26 Picture 27
Picture 27 Picture 28
Picture 28 Picture 29
Picture 29
 Picture 31
Picture 31 Picture 32
Picture 32 Picture 33
Picture 33 Picture 34
Picture 34 Picture 35
Picture 35